SeaPROFILER
Water Profile ranges from 0.08m to 150m
Bottom Track ranges from 0.3m to 300m
Key Features:
Each unit in the family leverage a core, common set of electronics in a flexible form factor. This combined with multiple packaging options [either horizontal or vertical electronics placement] provides for a cost-effective and extremely capable instrument to address a wide variety of oceanographic applications.
The SeaPROFILER ADCP’s are well suited for real-time current profiling applications such as coastal monitoring, where a bottom- mounted or surface-deployed configuration is used with a hard-wired communications and power source. The ability for the SeaPROFILER to also track the bottom allows it to be used in moving boat applications as well
|
300kHz 3" Beams |
600kHz 3" Beams |
600kHz 2" Beams |
600kHz 1" Beams |
1200kHz 2" Beams |
|
|---|---|---|---|---|---|
| Water Profile: | |||||
| Broadband |
100 m @ 4m Bin Size |
50 m @ 2m Bin Size |
45 m @ 2m Bin Size |
40 m @ 2m Bin Size |
20 m @ 1m Bin Size |
| Narrowband |
150 m @ 4m Bin Size |
75 m @ 2m Bin Size |
70 m @ 2m Bin Size |
50 m @ 2m Bin Size |
30 m @ 1m Bin Size |
| Minimum Blanking Distance | 32.0 cm | 16.0 cm | 16.0 cm | 16.0 cm | 8.0 cm |
| Minimum Bin Size | 2.8 cm | 1.4 cm | 1.4 cm | 1.4 cm | 0.7 cm |
| Maximum Number of Bins | 200 bins | 200 bins | 200 bins | 200 bins | 200 bins |
| Velocity Resolution | 0.01 cm/s | 0.01 cm/s | 0.01 cm/s | 0.01 cm/s | 0.01 cm/s |
| Long-Term Accuracy |
± 0.25% ± 2 mm/s |
± 0.25% ± 2 mm/s |
± 0.25% ± 2 mm/s |
± 0.50% ± 1.5 mm/s |
± 0.25% ± 2 mm/s |
| BB Single Ping Precision |
3.5 cm/s @ 4m bin size |
3.5 cm/s @ 2m bin size |
3.5 cm/s @ 2m bin size |
3.5 cm/s @ 2m bin size |
3.5 cm/s @ 1m bin size |
| NB Single Ping Precision |
20.0 cm/s @ 4m bin size |
20.0 cm/s @ 2m bin size |
20.0 cm/s @ 2m bin size |
20.0 cm/s @ 2m bin size |
20.0 cm/s @ 1m bin size |
| Velocity Range | ±5.0 m/s (Default); ±20.0 m/s (Maximum) | ±5.0 m/s (Default); ±20.0 m/s (Maximum) | ±5.0 m/s (Default); ±20.0 m/s (Maximum) | ±10.0 m/s (Default); ±20.0 m/s (Maximum) | ±5.0 m/s (Default); ±20.0 m/s (Maximum) |
| Amplitude Dynamic Range | 100 dB | 100 dB | 100 dB | 100 dB | 100 dB |
| Amplitude Presicion | 0.001 dB | 0.001 dB | 0.001 dB | 0.001 dB | 0.001 dB |
| Bottom Track: | |||||
| Minimum Altitude | 0.5 m | 0.3 m | 0.3 m | 0.3 m | 0.3 m |
| Maximum Altitude | 300 m | 130 m | 120 m | 70 m | 50m |
| Long-Term Accuracy |
± 0.70% ± 2 mm/s |
± 0.25% ± 2 mm/s |
± 0.50% ± 2 mm/s |
± 0.50% ± 1.5 mm/s |
± 0.25% ± 2 mm/s |
| Single Ping Precision |
0.6 cm/s @ 3 m/s |
0.5 cm/s @ 3 m/s |
0.5 cm/s @ 3 m/s |
1.5 cm/s @ 1.0 m/s |
0.4 cm/s @ 3 m/s |
| Data: | |||||
| Communcations | [RS-232 & RS-485], [RS-422], [Ethernet (UDP)] | ||||
| Ping Rate | Up to 10 hz | Up to 10 hz | Up to 10 hz | Up to 10 hz | Up to 10 hz |
| Internal Recording | 32 GB Micro SD Card | ||||
| Data Formats | RTB, RTD, PD0, PD3, PD4, PD5, PD6, PD13, MATLAB, CSV, Python | ||||
| Sensors: | |||||
| Compass | Range: 0°-360°, Accuracy: 1° RMS, Resolution: 0.01° | ||||
| Pitch/Roll | Range: Roll ±180° | Pitch ±90°, Accuracy: < 1° RMS, Resolution: 0.01° | ||||
| Water Temp | Range: -5° - 70°C, Accuracy: ±0.15°C | ||||
| Pressure | Range: Selectable, Accuracy: ±0.1% Range | ||||
| System: | |||||
| Transducer Size | 3 in | 3 in | 2 in | 1 in | 2 in |
| Configurations | 4-Beam, 5-Beam, 7-Beam, 8-Beam | ||||
| Beam Width | 2.80° | 1.42° | 2.16° | 3.50° | 1.01° |
| Beam Angle | 20° | 20° | 20° | 20° | 20° |
| Voltage Range | 12 - 36 Volt DC | ||||
| Average Power | 23 W | 30 W | 30 W | 30 W | 23 W |
| Temperature | -5° to 45° C (Operating), -30° to 60° C (Storage) | ||||
| Depth Rating | 300m, 3000m, 4000m, 6000m | ||||
| Material Options | Acetal(Plastic), Aluminum, Titanium | ||||
| Specifications may be subject to change at any time in the future | |||||


St. Lawrence Global Obsevatory

St. Lawrence Global Obsevatory has a great website that allows the user to see live and historical data of all their sensors deployed around the St. Lawrences' ecosystem. The observatory incorporates our Rowe Technologies Inc. SeaWATCH ADCP our their buoys. Our ADCP reports at the water surface and at 6 meters depth the water velocity and direction.
More information can be found here
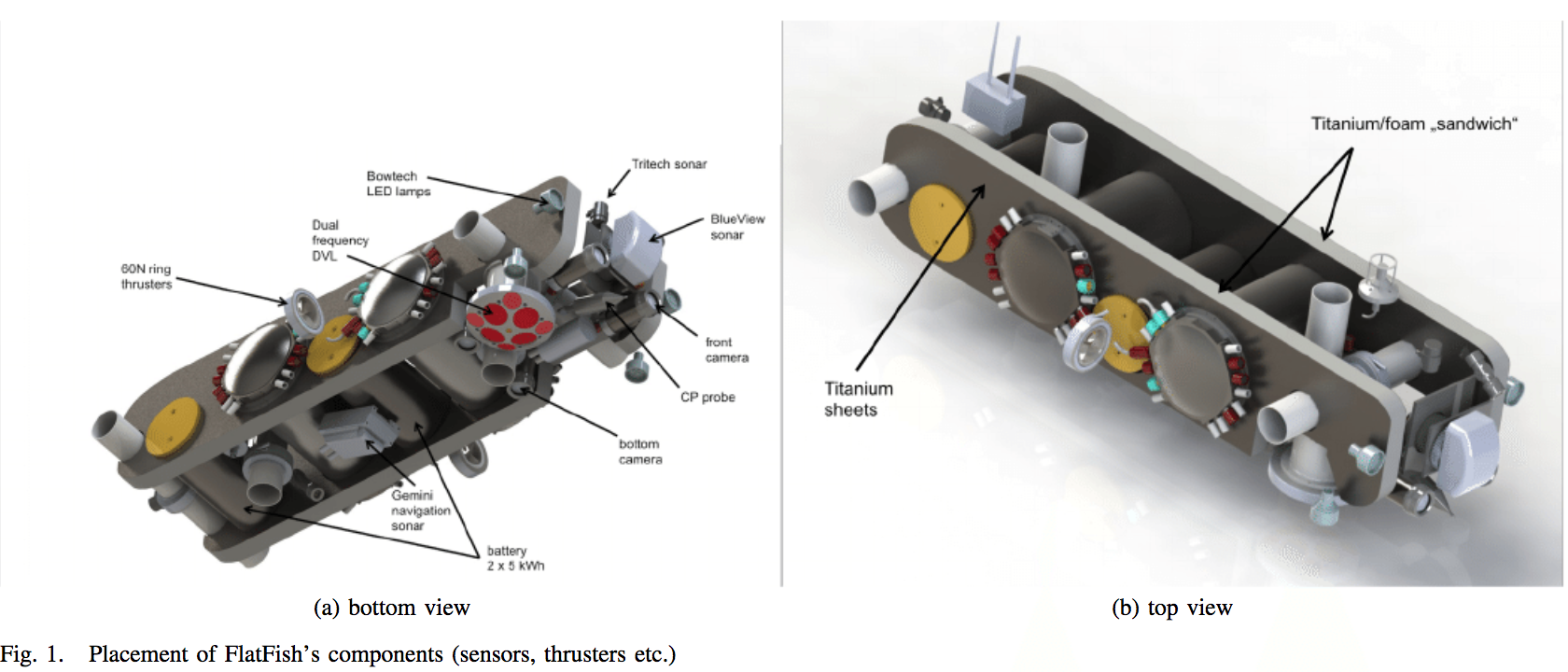
FlatFish AUV with Dual Frequency 300khz/1200khz
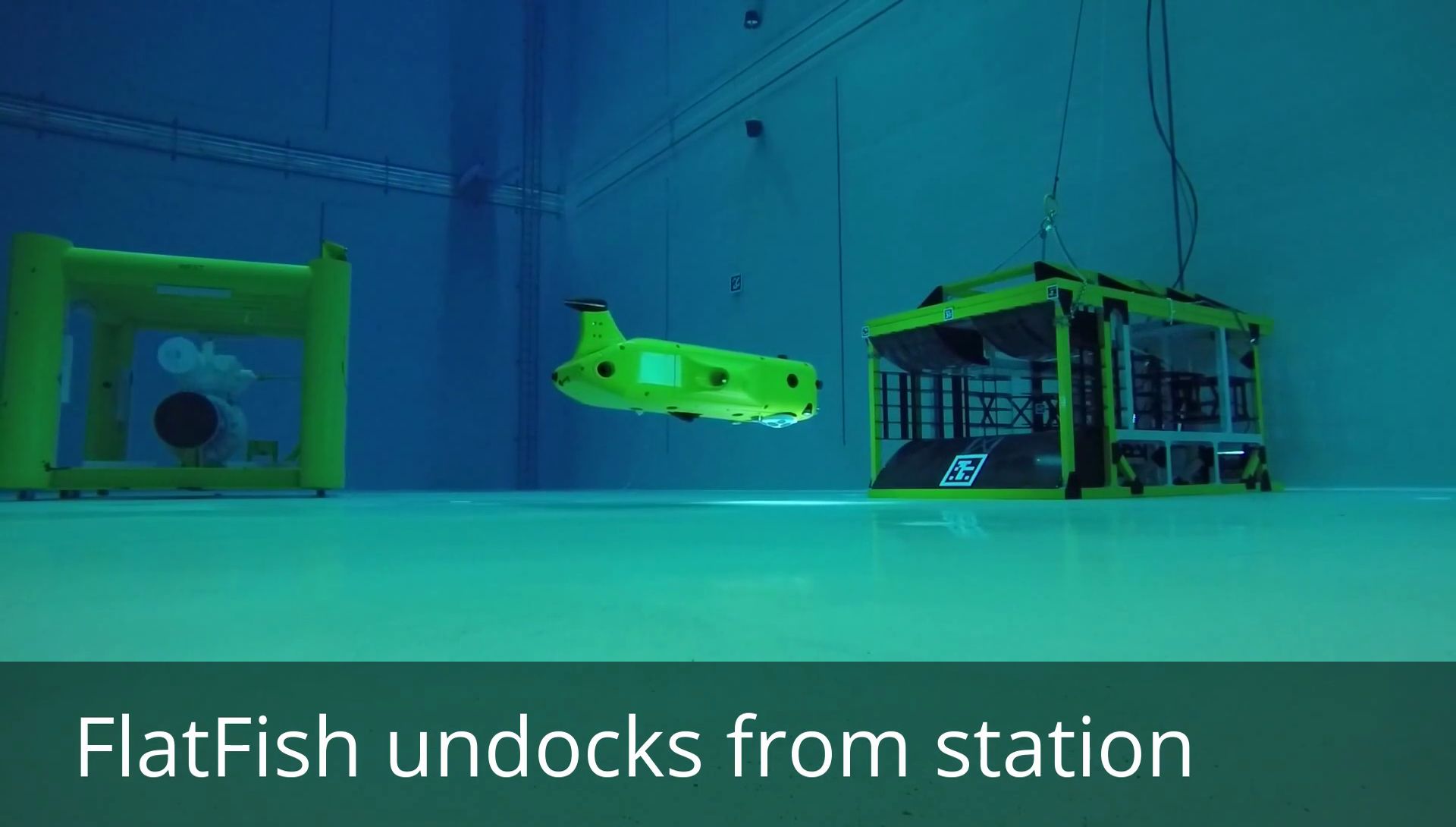
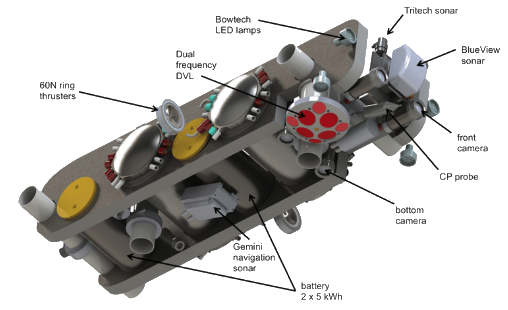
FlatFish is an autonomous underwater vehicle (AUV) for repeated inspections of oil & gas subsea structures whilst being submerged for extended periods of time.
LENG AUV with Dual Frequency 1200khz/1200khz Up/Down

The autonomous underwater vehicle (AUV) Leng was designed as long-distance exploration vehicle. Its shape was specifically designed to meet the requirements of the Europa-Explorer-Project: very small diameter (in order to fit into the ice drill) as well as a hydrodynamically optimized outer hull (in order to reduce energy consumption and enable long-range missions). The vehicle is equipped with a large number of different navigation sensors since localization quality and availability are of key importance – in the Europa-Explorer-scenario the vehicle has to return to its starting position (ice drill) even after having conducted long-distance missions.
| 0 MB | seaprofiler.pdf |
| 3 MB | RTI ADCP DVL USER GUIDE Rev AN.pdf |
| 0 MB | RTI Quick Start Guide - Rev C.pdf |
| 5 MB | RTI.Firmware.Updater.Installer.v.3.0.0.Full.exe |
| 0 MB | RTI.Firmware_0_2_143_Release.zip |
Note: Click on the heading text to expand or collapse panels to read the abtracts.
DOI: 10.23919/OCEANS.2015.7404442
Learn more
arXiv:1805.08011v1 [cs.RO] 21 May 2018
Learn more
![The FlatFish AUV [2] during sea trails. Image: Jan Albiez, SENAI CIMATEC](https://www.researchgate.net/profile/Lashika_Medagoda/publication/325283263/figure/fig1/AS:628931313029120@1526960318909/The-FlatFish-AUV-2-during-sea-trails-Image-Jan-Albiez-SENAI-CIMATEC.png)
ICRA 2016 Workshop on Marine Robot Localization and Navigation
Learn more
Sensors (Basel). 2017 Feb; 17(2): 415.
Learn more

Rio de Janeiro: UFRJ/COPPE, 2017.
Learn more
The need for continuous maintenance dredging has serious budgetary impacts for the Cochin Port Trust (COPT). Therefore Cochin Port Trust assigned Antea Group, IIC technologies and Stema Systems to collaborate on a study for the analysis of the siltation processes and to assess the feasibility to implement the nautical depth concept. The latter signifies to investigate the nature of the fluid mud seabed and determine to what extent vessels can sail through and manoeuvre in it.
Wodcon XXI Proceedings 2016.
Learn more
CEDA Dredging Days 2017, At Rotterdam
Learn more
NC State University Undergradute Research Symposium 2016.
Learn more



Science China Earth Science 61(7) · April 2018
Learn more
SOFTWARE PROJECT – Communication Systems Group, Prof. Dr. Burkhard Stiller 2016
Learn more
Learn more

Learn more

Learn more
